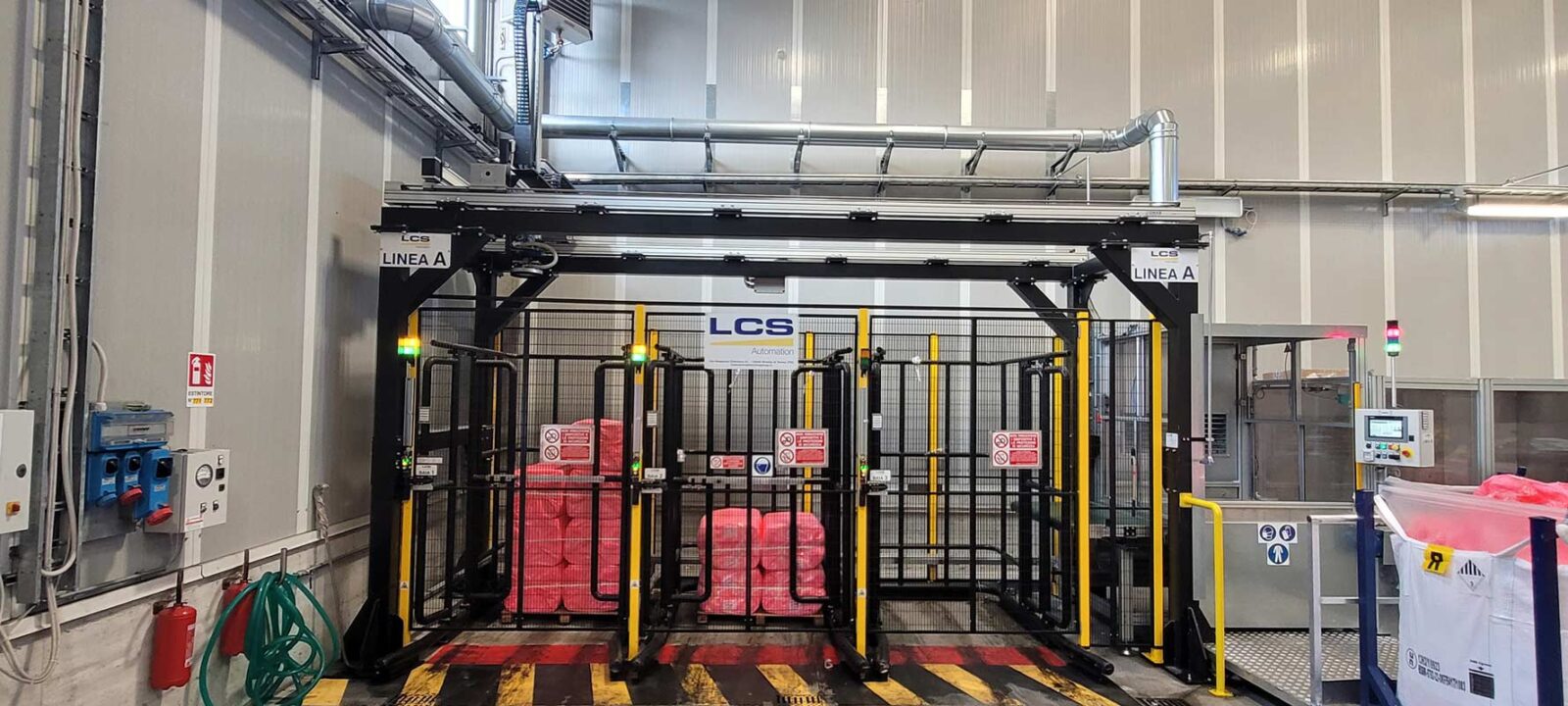
La proposta prevedeva la progettazione e la realizzazione di due linee automatiche di depallettizazzione, composte da un robot cartesiano di 6mt di corsa e 2 tunnel in acciaio inox. Il cartesiano preleva la balla e la deposita su un nastro trasportatore dove l’operatore, una volta eliminato l’involucro, tramite automatismo, può far defluire il materiale nel tunnel in acciaio inox senza venire a contatto con la fibra di vetro. Il sistema è controllato da un software realizzato su standard LCS.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}