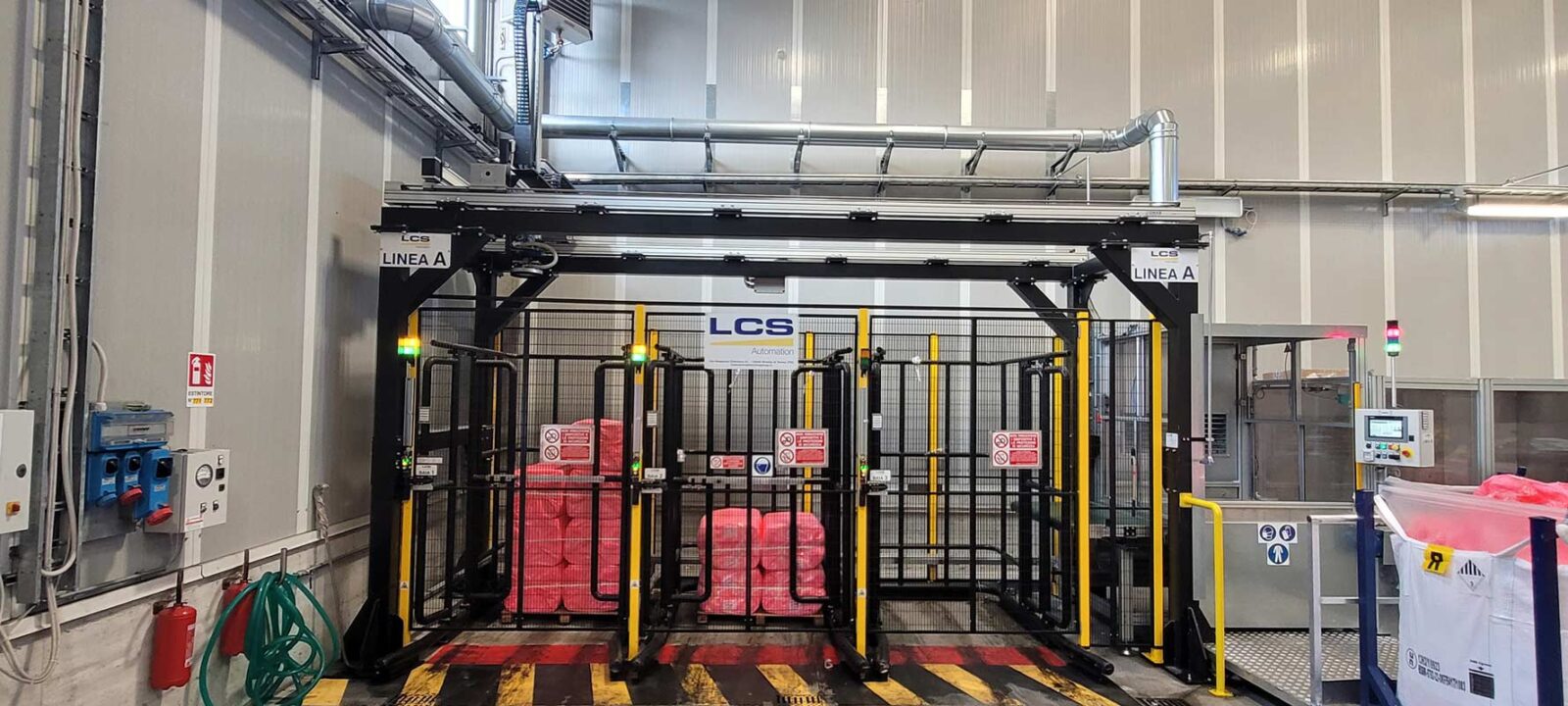
The proposed solution included the design and implementation of two automated depalletizing lines, consisting of a 6-meter stroke Cartesian robot and two stainless steel tunnels. The Cartesian system picks up the bale and places it on a conveyor belt where the operator, after removing the wrapping, can automatically direct the material into the stainless-steel tunnel without coming into contact with the fiberglass. The system is controlled by software developed according to LCS standards.


















{kind=link}
{kind=link}
{kind=link}